-
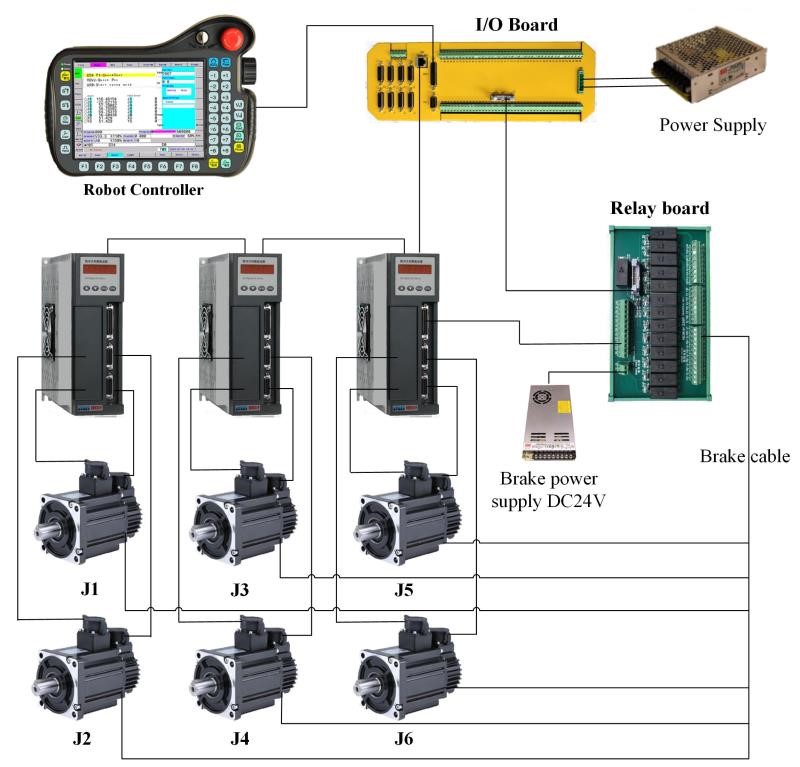
Базовый состав промышленных роботов
С точки зрения архитектуры робота можно разделить на три части и шесть систем, из которых три части следующие: механическая часть (используется для реализации различных действий), сенсорная часть (используется для восприятия внутренней и внешней информации), управляющая часть (управляет роботом для выполнения различных ...Читать далее -
Стратегия навыков программирования обрабатывающего центра с ЧПУ
Для обработки на станках с ЧПУ программирование имеет большое значение, что напрямую влияет на качество и эффективность обработки. Так как же быстро освоить навыки программирования обрабатывающих центров с ЧПУ? Давайте учиться вместе! Команда паузы, G04X(U)_/P_ относится к времени паузы инструмента (остановка подачи, шпиндель ...Читать далее -

Семь технических моментов тенденций развития станков с ЧПУ в Китае.
Аспект 1: Станки с составными частями на подъеме. Благодаря мощным возможностям управления станков с ЧПУ высокого класса, все более сложной технологии проектирования и производства, а также все более зрелой технологии применения, включая программирование, станки с составными частями, с их мощност...Читать далее






